




Là một cơ cấu truyền động, bánh răng hành tinh được sử dụng rộng rãi trong nhiều ứng dụng kỹ thuật khác nhau, chẳng hạn như hộp giảm tốc, cần cẩu, hộp giảm tốc bánh răng hành tinh, v.v. Đối với hộp giảm tốc bánh răng hành tinh, nó có thể thay thế cơ cấu truyền động của hệ thống bánh răng trục cố định trong nhiều trường hợp. Bởi vì quá trình truyền động bánh răng là tiếp xúc tuyến tính, việc ăn khớp lâu dài sẽ gây ra hỏng bánh răng, do đó cần phải mô phỏng độ bền của nó. Li Hongli và cộng sự đã sử dụng phương pháp tạo lưới tự động để tạo lưới cho bánh răng hành tinh và thu được kết quả là mômen xoắn và ứng suất tối đa có mối quan hệ tuyến tính. Wang Yanjun và cộng sự cũng đã tạo lưới cho bánh răng hành tinh thông qua phương pháp tạo tự động và mô phỏng tĩnh học và mô phỏng dao động của bánh răng hành tinh. Trong bài báo này, các phần tử tứ diện và lục diện chủ yếu được sử dụng để chia lưới, và kết quả cuối cùng được phân tích để xem liệu các điều kiện về độ bền có được đáp ứng hay không.
1. Xây dựng mô hình và phân tích kết quả
Mô hình hóa ba chiều của bánh răng hành tinh
Bánh răng hành tinhHệ thống chủ yếu bao gồm bánh răng vành trong, bánh răng mặt trời và bánh răng hành tinh. Các thông số chính được lựa chọn trong bài báo này là: số răng của bánh răng vành trong là 66, số răng của bánh răng mặt trời là 36, số răng của bánh răng hành tinh là 15, đường kính ngoài của bánh răng vành trong là 150 mm, môđun là 2 mm, góc ép là 20°, chiều rộng răng là 20 mm, hệ số chiều cao đỉnh răng là 1, hệ số khe hở là 0,25, và có ba bánh răng hành tinh.
Phân tích mô phỏng tĩnh của bộ truyền động hành tinh
Xác định các thuộc tính vật liệu: nhập hệ thống bánh răng hành tinh ba chiều được vẽ trong phần mềm UG vào ANSYS và thiết lập các thông số vật liệu, như thể hiện trong Bảng 1 bên dưới:

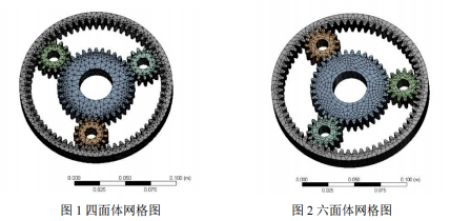
Lưới phần tử hữu hạn: Lưới phần tử hữu hạn được chia thành các hình tứ diện và hình lục diện, kích thước cơ bản của phần tử là 5mm. Vì vậy,bánh răng hành tinhBánh răng mặt trời và vòng răng trong tiếp xúc và ăn khớp với nhau, độ dày của lưới tiếp xúc và ăn khớp được tăng lên, kích thước là 2mm. Đầu tiên, sử dụng lưới tứ diện, như thể hiện trong Hình 1. Tổng cộng có 105906 phần tử và 177893 nút được tạo ra. Sau đó, sử dụng lưới lục diện, như thể hiện trong Hình 2, và tổng cộng có 26957 ô và 140560 nút được tạo ra.
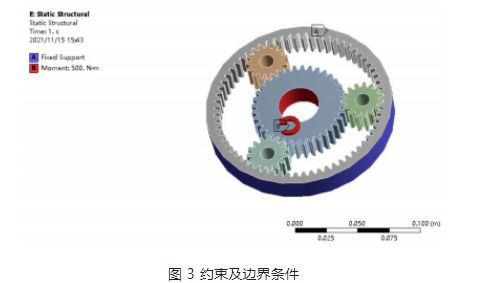
Ứng dụng tải và điều kiện biên: theo đặc tính hoạt động của bộ truyền bánh răng hành tinh trong hộp giảm tốc, bánh răng mặt trời là bánh răng dẫn động, bộ truyền bánh răng hành tinh là bánh răng bị dẫn động, và đầu ra cuối cùng được truyền qua giá đỡ bánh răng hành tinh. Cố định vòng răng trong trong ANSYS, và tác dụng mô-men xoắn 500N·m lên bánh răng mặt trời, như thể hiện trong Hình 3.
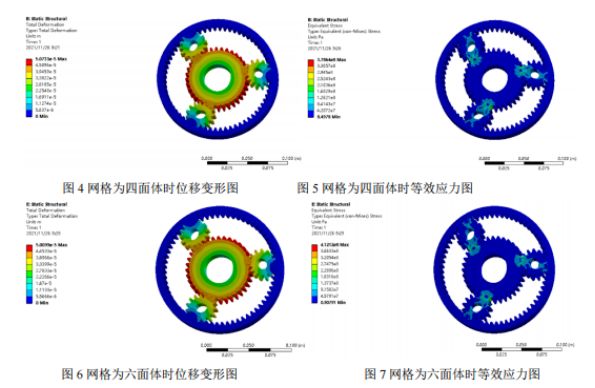
Xử lý hậu kỳ và phân tích kết quả: Biểu đồ dịch chuyển và biểu đồ ứng suất tương đương của phân tích tĩnh thu được từ hai cách chia lưới được trình bày bên dưới, và phân tích so sánh được tiến hành. Từ biểu đồ dịch chuyển của hai loại lưới, nhận thấy rằng độ dịch chuyển lớn nhất xảy ra tại vị trí bánh răng mặt trời không ăn khớp với bánh răng hành tinh, và ứng suất lớn nhất xảy ra tại gốc của khớp bánh răng. Ứng suất lớn nhất của lưới tứ diện là 378MPa, và ứng suất lớn nhất của lưới lục diện là 412MPa. Vì giới hạn chảy của vật liệu là 785MPa và hệ số an toàn là 1,5, nên ứng suất cho phép là 523MPa. Ứng suất lớn nhất của cả hai kết quả đều nhỏ hơn ứng suất cho phép, và cả hai đều đáp ứng điều kiện bền.
2. Kết luận
Thông qua mô phỏng phần tử hữu hạn của bộ truyền hành tinh, thu được biểu đồ biến dạng dịch chuyển và biểu đồ ứng suất tương đương của hệ thống bánh răng, từ đó xác định được dữ liệu tối đa và tối thiểu cùng sự phân bố của chúng.bánh răng hành tinhCó thể tìm thấy mô hình. Vị trí có ứng suất tương đương lớn nhất cũng là vị trí mà răng bánh răng dễ bị hỏng nhất, vì vậy cần đặc biệt chú ý đến vị trí này trong quá trình thiết kế hoặc sản xuất. Thông qua phân tích toàn bộ hệ thống bánh răng hành tinh, sai sót do chỉ phân tích một răng bánh răng gây ra được khắc phục.
Thời gian đăng bài: 28/12/2022